1.创建控制系统
单击界面菜单中的工具(Tools ),然后单击工具下的插件管理器( Plugin Manager ),系统弹加载模块。在模块中选择Adams Controls和Adams Mechatronics两项,如图8-35所示,然后单击确定(OK)按钮加载。
单击界面菜单Mechatronics(机械电子学),然后依次单击控制系统( Control System) →新建(New)系统弹出创建控制系统对话框。
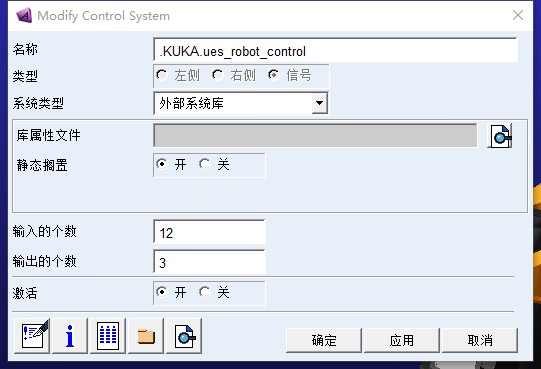
在名称(Name )中输入robot_control,在系统类型(System Type栏中选择外部系统库(External System Library ),在静态搁置(Static Hold)栏中选择开(On )在输入的个数( Number of Inputs )栏中输入12,在输出的个数( Number of Outputs )栏中输入3,如图所示。然后单击

在创建单变量对话框中按照如图所示的参数进行设置。然后单击OK(确定)按钮完成设置。
2.创建传感器信号
-
分别在两个连杆之间建立12个测量参考点,用于建立关节角测量传感器
-
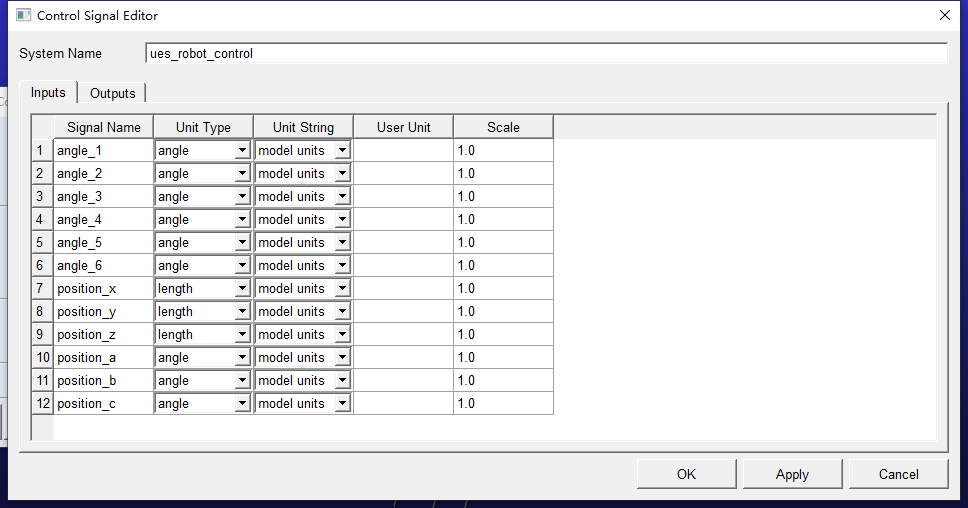
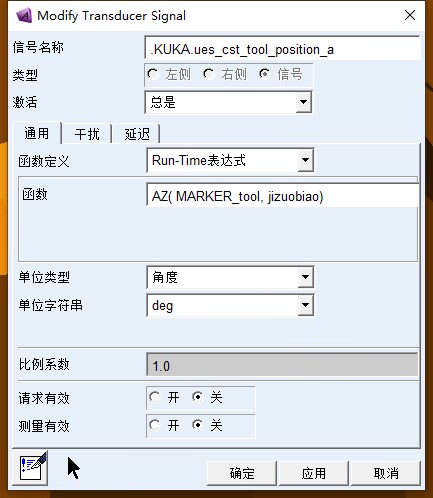
在界面上依次单击机械电子学(Mechatronics)→机械系统(Mechanical System )→传感器信号( Transducer Signal)→新建(New ),系统弹出创建传感器信号对话框。在信号名称 (Signal Name)栏中输入axis_angle_1,在函数(Function)栏中输入(
AZ( ref_2, ref_1)),在单位类型栏中选择角度,在单位字符串栏中选择rad,在请求有效栏后的选项中选中开,如图所示,然后单击确定按钮,通过上述步骤建立6个关节角的传感器信号。
-
在界面上依次单击机械电子学(Mechatronics )→机械系统(Mechanical System )→传感器信号( Transducer Signal )→新建(New),系统弹出创建输入信号对话框,添加末端位姿测量传感器,以基座标为基准。
-
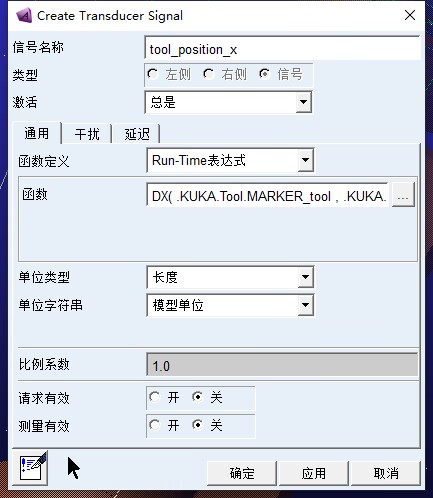
在信号名称( Signal Name)栏中输入
tool_position_x,在函数(Function )栏中输入DX( .KUKA.Tool.MARKER_tool , .KUKA.base.jizuobiao , .KUKA.base.jizuobiao )。 -
在单位类型(Unit Type )栏中选择长度( length ),在单位字符串 ( Unit String )栏中选择模型单位 ( model units ),在请求有效(Request Active)栏中选中开(On ),如图所示,然后单击确定(OK)按钮,同理添加姿态传感器信号。

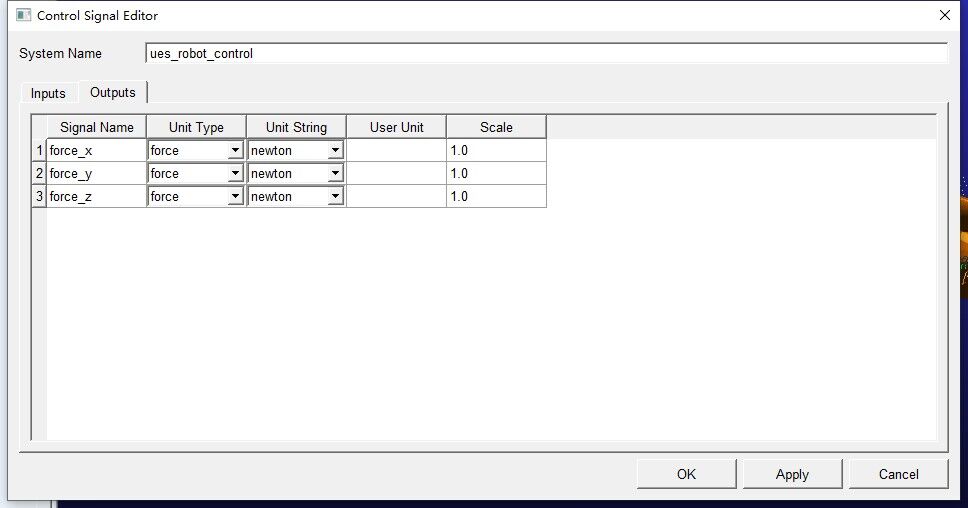
3.创建激励信号
- 在界面上依次单击机械电子学( Mechatronics )→机械系统( Mechanical System )→激励信号( Actuator Signal )→新建( New),系统弹出创建激励信号对话框。
- 在信号名称( Signal Name)栏中输入controller_torque,在单位类型( Unit Type)栏中选择扭矩( torque ),在单位字符串(Unit String )栏中选择模型单位( model units ),在请求有效(RequestActive)栏中选中开( On ),如图8-43所示,然后单击确定(OK)按钮。
4.编辑控制系统
-
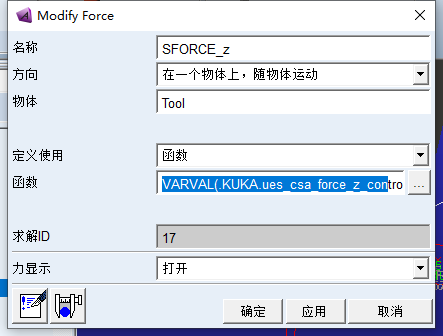
在界面上单击编辑(Edit)菜单,然后单击修改( Modify )选项,双击ball_beam,从中选择SFORCE_x,单击确定(OK)按钮,系统弹出控制系统。
-
单击函数( Function ),在其中输入
VARVAL(.KUKA.ues_csa_force_z_control.signal_variable),其余采用默认设置,然后单击确定(OK)按钮完成创建,如图所示。5.用信号管理器连接信号
-
在界面上依次单击机械电子学(Mechatronics )→信号管理(Signal Manager )→显示( Display ) ,如图所示,单击应用( Apply)按钮,系统弹出信号管理器。
-
双击信号管理器中的任意一个表格,系统弹出信号管理,单击Inputs(输入)中的第一栏,系统弹出如图所示的对话框。单击Connector Signal Name(连接信号名称)下的第一行,然后单击Select(选择)按钮,再单击Apply(应用)按钮,将输入输出与信号进行连接。
-
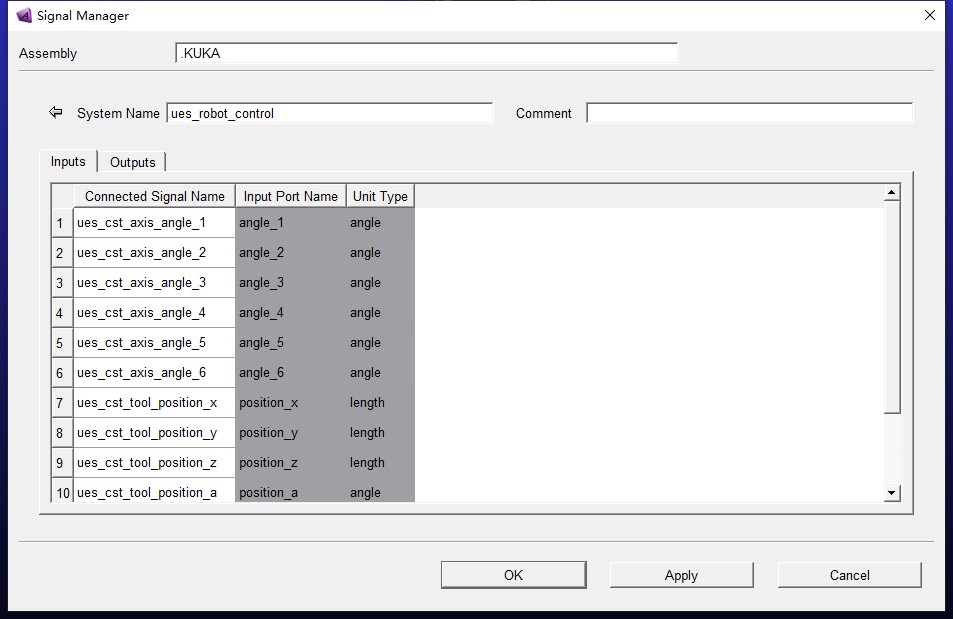
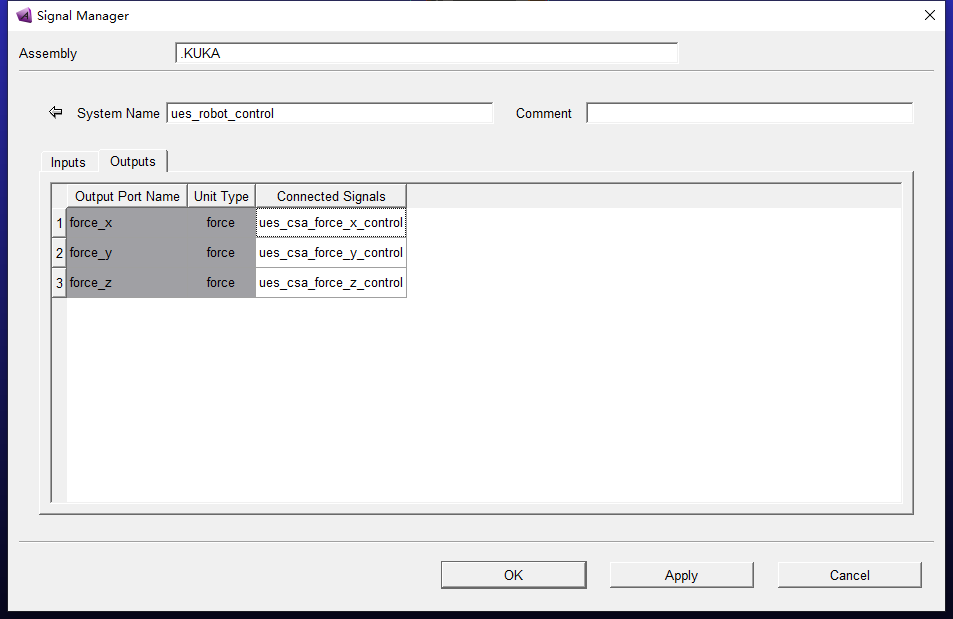
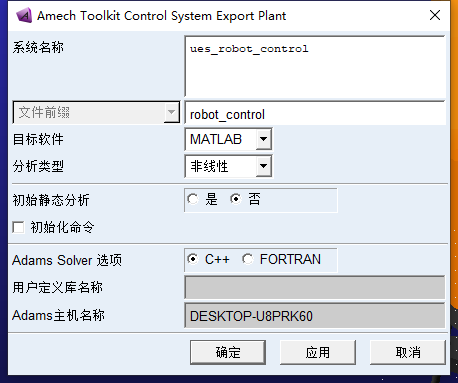
6.输出面板
在界面菜单中依次单击机械电子学(Mechatronics )→工具(Tools )→输出面板(Export Plant)系统弹出输出面板控制系统,在系统名称(System Name )中输入ues_robot_control,在文件前辍( File Prefix )栏中输入robot_control,在目标软件(Target Software)栏中选择MATLAB,如图所示。单击确定(OK)按钮,系统弹出信息提示,单击确定(OK)按钮关闭信息。